


飞行高度设定为40m左右的理由有两点。一是飞行上的原因,据称高度较高飞行会较稳定。
多轴飞行器虽然不容易受横向风力的影响,但容易受上下方向风力的影响。uin太阳能电池板等地面构造物的影响,地表附近的风会吹向上空,如果飞行机器人的高度较低,有时会妨碍稳定飞行。
另一个是拍摄图像画质上的原因。无人直升机的航拍高度越高,每张照片中拍摄的太阳能电池板的数量就越多。但如果相机分辨率不够高,图像就会不清晰,从而导致无法辨别电池板内可能会出现输出异常的位置。
从无人直升机配备的相机来看,考虑到在维持所需画质的同时,拍摄尽量多的电池板,40m的高度最合适。
每张图像能拍东西方向的2.5行太阳能电池板。这样一次可拍摄2行,如果有10行,理论上只需沿东西方向飞行5次即可拍完,可提高效率。
但据称目前很难实现。因相机的方向和太阳能电池板的角度问题,电池板的表面会反射光,或者倒映云彩等,有时图像拍得不清晰,为保证准确性,需要对电池板从不同角度进行拍摄,因此是一行一行地拍摄。
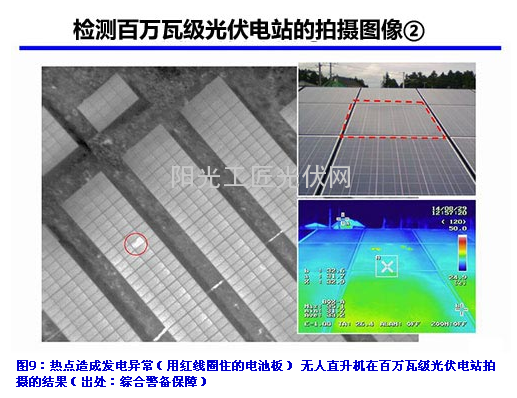
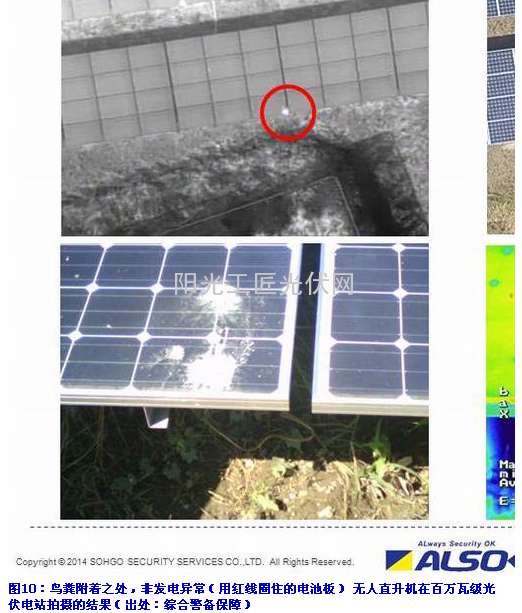
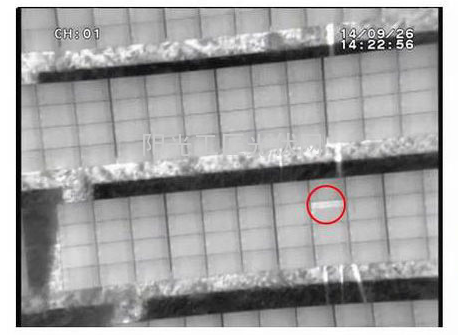
图像是红外相机和普通相机同时拍摄的。由此可确认热分布存在异常的部分以及该部分的电池板表面状态。该公司称,在验证实验和试用服务中,已经掌握了诸如: 热点发生(图9)、鸟粪附着(图10)、随电池单元输出异常(发电元件,图11)的旁路二极管回避、被杂草覆盖导致输出功率部分降低(图12)、接线盒故 障导致电池板整体停止发电(图13)、玻璃破碎等问题。玻璃破碎一般很难通过图像辨别,但无人直升机采用的是1920×1080像素的高分辨率相机,因此 能够辨别出来。
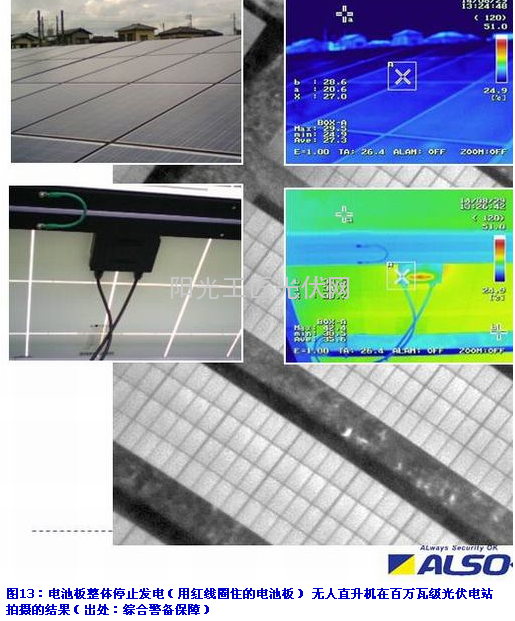
电池板整体停止发电(用红线圈住的电池板) 无人直升机在百万瓦级光伏电站拍摄的结果
综合警备保障公司预计,今后,把对太阳能电池板持续进行定点观测拍摄的热图像和普通图像积累起来,其价值会不断升高。
这是因为,对从同一角度定期拍摄的热图像进行比较,可推测太阳能电池板的故障率,或者估算维护成本,是影响20年发电业务利润的重要数据。
在与40MW级光伏电站谈判
利用无人直升机航拍也存在限制和课题。例如,风力较大时很难保持稳定的飞行。综合警备保障公司的无人直升机规定的飞行条件为厂商推荐的5m/s以下的风速。
在风速超过5m/s的日子以及降雨的日子要延后飞行,因此该公司称正在考虑提供能灵活应对变化的服务内容,比如“在一定期间内实施一次航拍”等。
另外,一架无人直升机一天能航拍的发电站最多只有四座,因此业务模式的构筑也是个课题。
航拍数量有限是因为,飞行时间基本只限于上午。因为大多时候上午很少出现刮风和下雨的情况。
而且,上午的日照量较多,发生热点等故障的部分和正常部分的温差会增大,更容易发现异常。
在目前的试用服务阶段,为最大约2MW的百万瓦级光伏电站提供了无人直升机服务,另外还正在与40MW级百万瓦级光伏电站谈判。关于费用,已经告知了享受试用服务的客户。
另外,无人直升机仅限在远离住宅区、行人较少之处设置的光伏电站使用。这样,万一飞行中的小型无人直升机出现故障时,能尽可能优先保证安全。
此外,GPS的精度也是个问题。现在受GPS精度的影响,在最大2m的范围内设定的路线和飞行路线会出现偏差。
在太阳能电池板排列得满满、没有多余空间的百万瓦级光伏电站进行航拍时,飞行路线偏差可能会导致飞行机器人降落在电池板上。为防止出现这种情况,降落时切换为了手动操作。

















 >
> >
>
